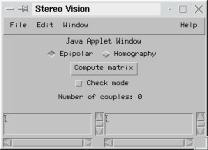
The applet presents the aspects of the
epipolar geometry in stereo vision applications.
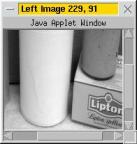
Choose some pairs of
corresponding characteristic points on the images.
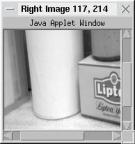
Given a few correspondences we
can compute the matrix of correspondence
(fundamental matrix) for these images. Then
by clicking on a point in one of the images we can
compute an epipolar line for the second image.
The corresponding point can be then found on the epipolar line.
In case of homography matrix
(planar scenes) we can compute point-to-point
correspondences.
- Set default tokens from the Edit menu.
- Press the button Compute matrix.
- Check the box Check mode.
- Press and dragg mouse pointer in one of
the images and observe the second image.
- Uncheck the box Check mode.
- Open Asterix from the File>Open Image
menu.
- Set a few correspoonding paires of
points in two images by clicking on them
(first on the left, next on the right
etc.).
- Repeat steps 2, 3, 4.
The Stereo Vision applet can be downloaded and run with command:
>java StereoWindow
|
|